Links and joints#
Links and joints definitions#
Kinematic joint definition
Two adjacent bodies.
In permanent contact.
With relative motion between between them. The number of d.o.f. allowed by such relative motion defines the joint degree.
Degree one (I) joints#
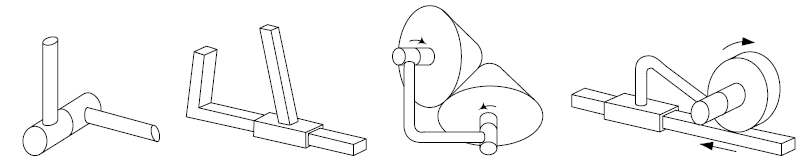
Revolute:
Prismatic:
Helical:
Degree two (II) joints#
Cylindrical:
Rotation + translation: