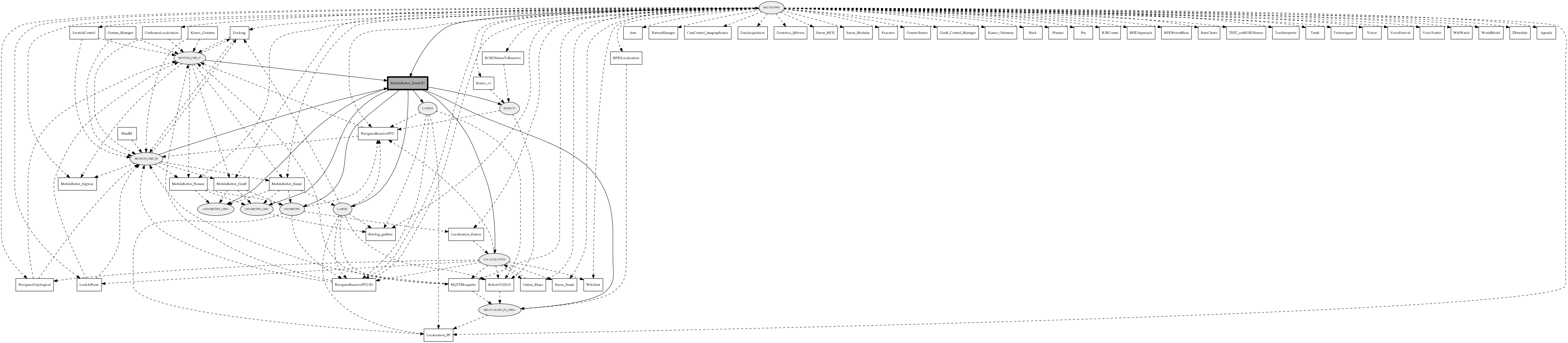
| Module name | Short description | Publishes | Subscribes |
| MobileRobot_Simul3D | A simulated mobile robot with two lasers and one kinect. | <ODOMETRY_OBS> , KINECT1 , LASER1 , LASER2 , LOCALIZATION , ODOMETRY , ODOMETRY_OBS , RELOCALIZE_IN_AREA | MOTION_CMD_V , MOTION_CMD_W , SHUTDOWN |
(None)