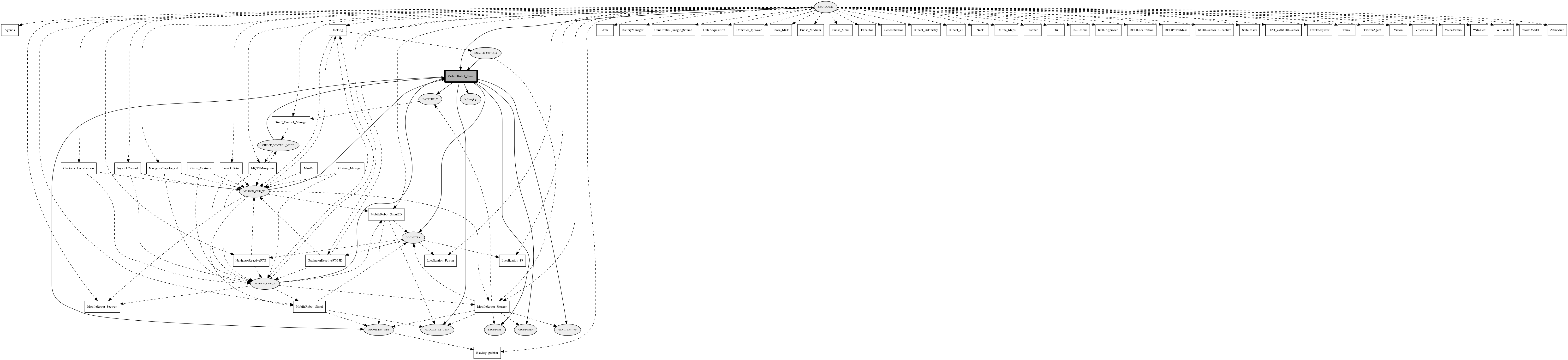
| Module name | Short description | Publishes | Subscribes |
| MobileRobot_Giraff | The interface to a ActivMedia robotic bases (Giraff DX/AT, PeopleBot, etc). | <BATTERY_V> , <BUMPERS> , <ODOMETRY_OBS> , BATTERY_V , FBUMPERS , Is_Charging: , ODOMETRY , ODOMETRY_OBS | ENABLE_MOTORS , GIRAFF_CONTROL_MODE , MOTION_CMD_V , MOTION_CMD_W , SHUTDOWN |
| Parameter | Description |
CActivMediaRobotBase_Parameters |
See description here mrpt::hwdrivers::CActivMediaRobotBase |