Global overview
All modules
All variables
All commands
Mission files
Pipelines
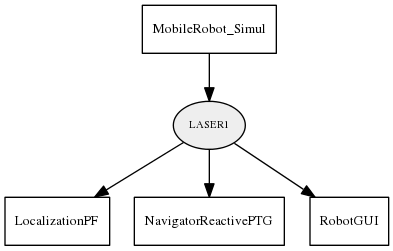
Variable: LASER1
Variable info:
Variable name
Short description
Who publishes it?
Who subscribes to it?
LASER1
The laser scan, as a "CObservation2DRangeScan" passed to std::vector<uint8_t> through ObjectToOctetVector()
MobileRobot_Simul
LocalizationPF
NavigatorReactivePTG
RobotGUI
Variable graph:
Detailed description:
The laser scan, as a "CObservation2DRangeScan" passed to std::vector<uint8_t> through ObjectToOctetVector()
Page generated by
Mooxygen 1.1.0
at Mon May 26 00:45:07 2014