Global overview
All modules
All variables
All commands
Mission files
Pipelines
Variable: <MOTION_CMD_W>
Variable info:
Variable name
Short description
Who publishes it?
Who subscribes to it?
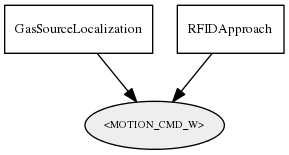
<MOTION_CMD_W>
The desired robot angular speed (rad/s)
GasSourceLocalization
RFIDApproach
Variable graph:
Detailed description:
The desired robot angular speed (rad/s)
Page generated by
Mooxygen 1.1.0
at Mon May 26 00:30:12 2014