Global overview
All modules
All variables
All commands
Mission files
Pipelines
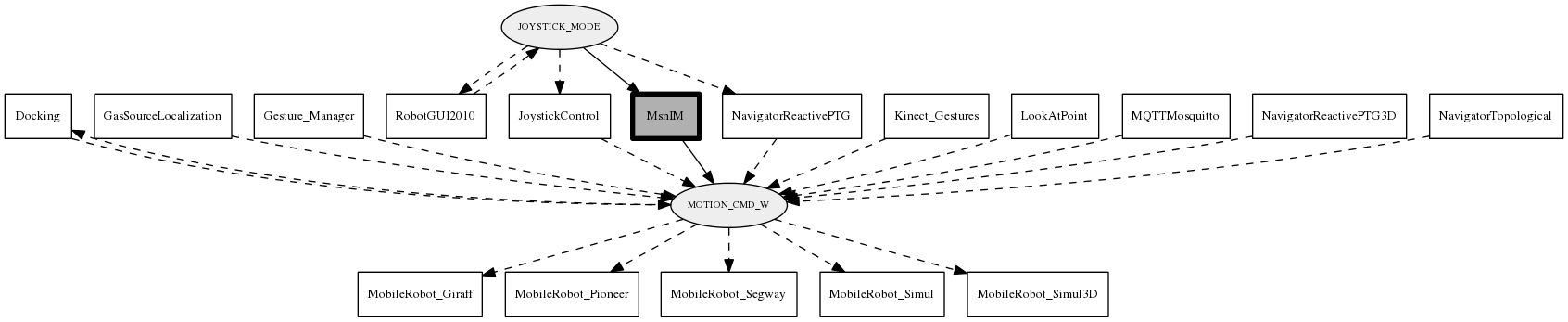
Module: MsnIM
Module info:
Module name
Short description
Publishes
Subscribes
MsnIM
Allow the robot to be commanded with a Joystick.
MOTION_CMD_W
JOYSTICK_MODE
MOOS commands accepted by the module:
(None)
Parameters accepted in the MOOS mission file:
Parameter
Description
max_v
Maximum robot linear speed (m/s)
Detailed description:
Allow the robot to be commanded with a Joystick.
Module graph:
TODO list:
(None)
Changes log:
(None)
Page generated by
Mooxygen 1.1.0
at Mon May 26 00:30:12 2014