This page describes the dataset, and the particle filter localization experiments (including how to reproduce them), reported in the following work:
@article{blanco2019bpf,
author = {Blanco, Jos{’{e}}-Luis and Ma{~{n}}as-Alvarez, Francisco and Torres, Jose Luis and Rodriguez-Diaz, Francisco and Gim{’{e}}nez-Fern{’{a}}ndez, Antonio},
month = {jul},
title = {Benchmarking Particle Filter Algorithms for Efficient Velodyne-based Vehicle Localization},
journal = {Sensors},
volume = {19},
number = {14},
year = {2019},
url = {https://www.mdpi.com/1424-8220/19/14/3155},
doi = {10.3390/s19143155}
}
See this YouTube video for a global localization experiment.
Install MRPT:
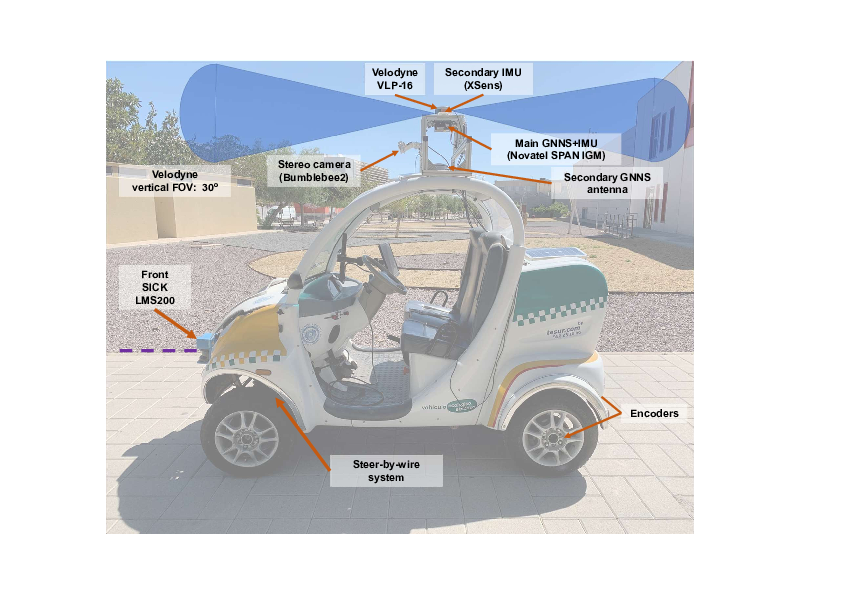
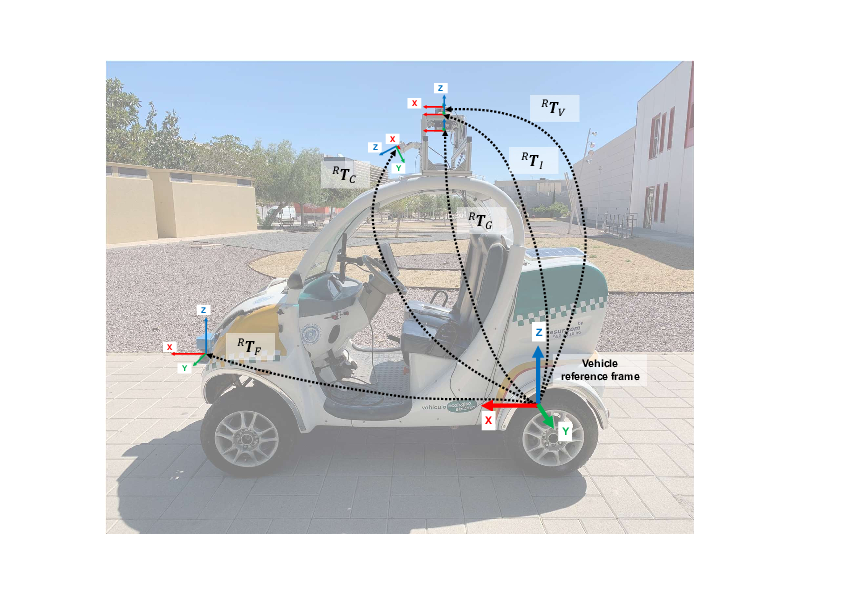
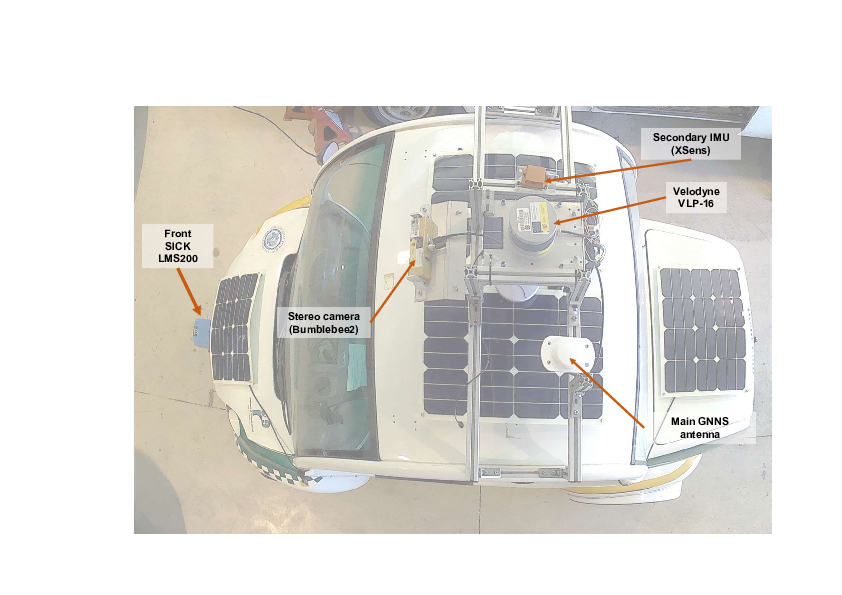
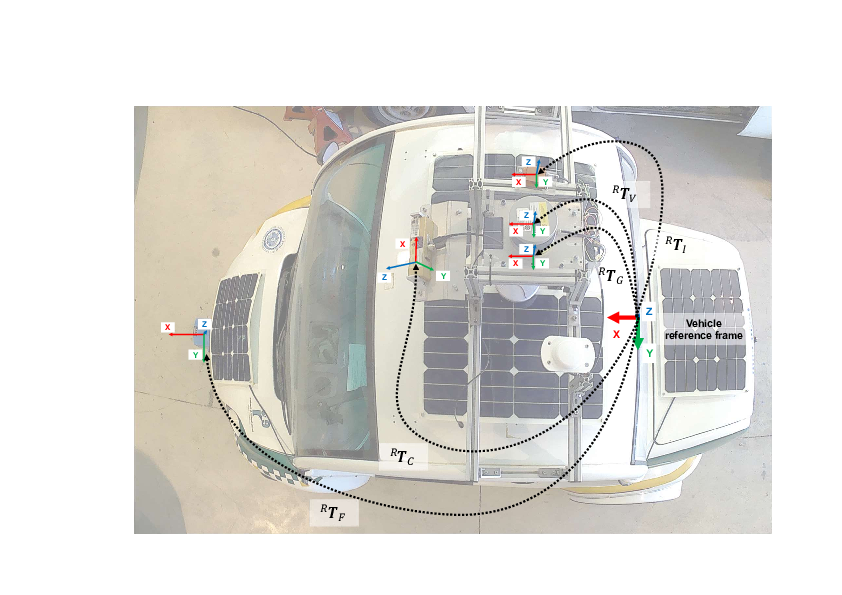
The following pictures illustrate the different sensors available on the vehicle:
Download the following files:
robot-map-gui.Other files available for download:
.rawlog format. Use RawLogViewer to inspect it.Download pf-tracking.ini and put it in the same directory than the rest of .simplemap and .rawlog files.
Make sure you installed MRPT (e.g. sudo apt-get install mrpt-apps in Ubuntu), and that you have MRPT version >=1.9.9, running pf-localization.
Run the experiment:
pf-localization pf-tracking.ini
Download pf-global.ini and put it in the same directory than the rest of .simplemap and .rawlog files.
After installing MRPT (e.g. sudo apt-get install mrpt-apps in Ubuntu), run:
pf-localization pf-global.ini